Difference between revisions of "10393"
| Line 2: | Line 2: | ||
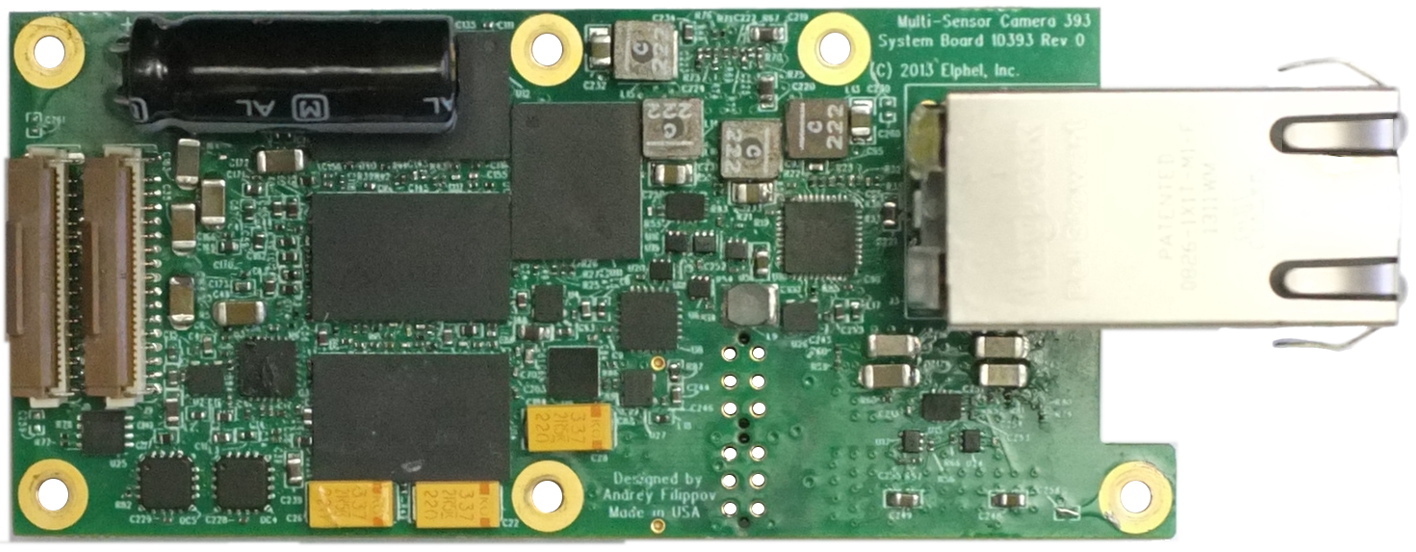
[[Image:10393_bottom_sm.png|frame|[[Media:10393_bottom.jpeg|10393 board, bottom view]]]] | [[Image:10393_bottom_sm.png|frame|[[Media:10393_bottom.jpeg|10393 board, bottom view]]]] | ||
[[Image:10393_bd.png|frame|[[Media:10393.pdf|10393 Circuit Diagram, Parts List, PCB layout]] [[Media:10393_gerber.tar.gz|10353 Gerber files]]]] | [[Image:10393_bd.png|frame|[[Media:10393.pdf|10393 Circuit Diagram, Parts List, PCB layout]] [[Media:10393_gerber.tar.gz|10353 Gerber files]]]] | ||
| + | 10393 is the system board of Elphel NC393 series camera. It will also replace [[10353|10353 board]] in [[Elphel_Eyesis4Pi|Eyesis4pi] and other Elphel multi-sensor cameras. It has the same physical dimensions as 10353 and may be used as an upgrade to the previous camera modules. | ||
| + | |||
| + | This camera system board is designed to simultaneously support multiple sensors - both with legacy parallel interface (it is directly compatible with [[10338|10338 Sensor board]] and [[10359|10359 Sensor multiplexer board]]) and with new high-speed serial interface (up to 8 lanes + clock per each port). Sensor ports of the 10393 can be combined to interface larger/higher speed sensors, interface supply voltage is programmable in the range of 1.35V to 2.8V. All the sensor port interface signals are routed directly to the FPGA pads (22 I/O signals on each of the 4 flex cable connectors) , so the same ports can be uses for other purposes, for example to control the motors or interface IMU of the quadcopter. | ||
| + | |||
| + | Block diagram below shows major parts and I/O ports of the 10393 board: | ||
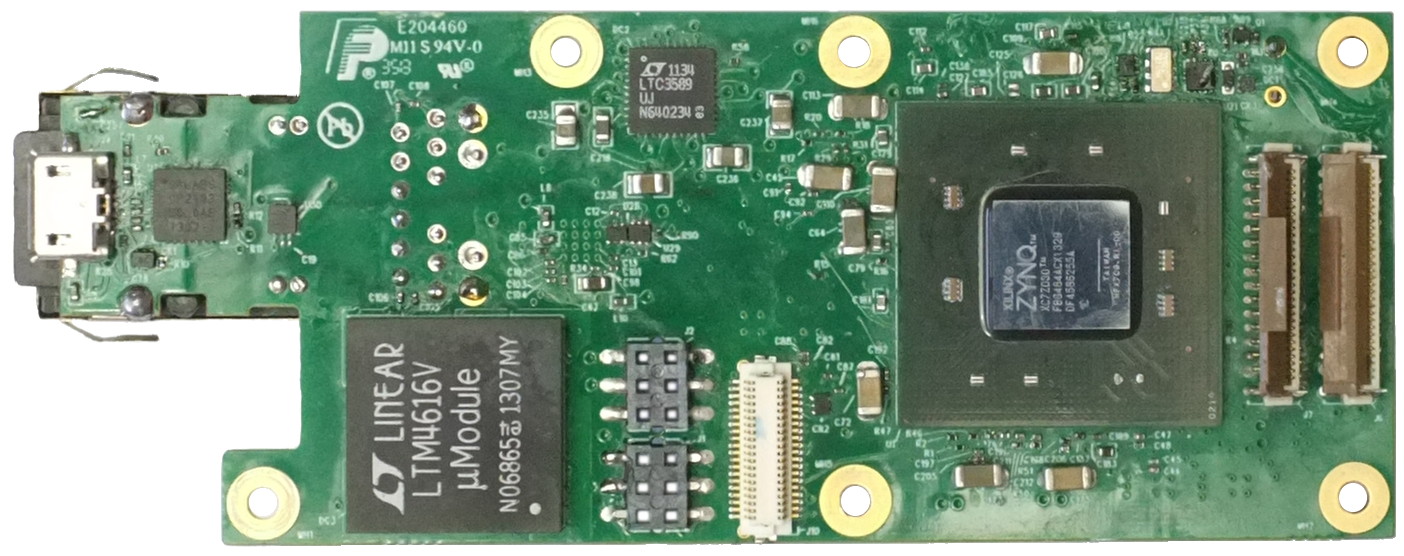
| + | * The system is built around Xilinx Zync SoC that combines a dual-core ARM processor, a rich set of the standard peripherals and FPGA on the same chip. This combination provides high bandwidth connection between the processors and the FPGA fabric | ||
| + | * 4 identical sensor ports are 30-conductor 0.5mm pitch flex cable connectors, compatible with earlier Elphel products. These connectors are split into two pairs, so they are closest to one short edge of the board - two on each side. Combined with an external multiplexer boards (at the expense of proportionally lower frame rate) each 10393 can work with up to 16 sensors (12 with the existing [[10359|10359 board]]) | ||
| + | * | ||
Revision as of 17:52, 25 September 2015



{kind=link}
{kind=link}
10393 is the system board of Elphel NC393 series camera. It will also replace 10353 board in [[Elphel_Eyesis4Pi|Eyesis4pi] and other Elphel multi-sensor cameras. It has the same physical dimensions as 10353 and may be used as an upgrade to the previous camera modules.
This camera system board is designed to simultaneously support multiple sensors - both with legacy parallel interface (it is directly compatible with 10338 Sensor board and 10359 Sensor multiplexer board) and with new high-speed serial interface (up to 8 lanes + clock per each port). Sensor ports of the 10393 can be combined to interface larger/higher speed sensors, interface supply voltage is programmable in the range of 1.35V to 2.8V. All the sensor port interface signals are routed directly to the FPGA pads (22 I/O signals on each of the 4 flex cable connectors) , so the same ports can be uses for other purposes, for example to control the motors or interface IMU of the quadcopter.
Block diagram below shows major parts and I/O ports of the 10393 board:
- The system is built around Xilinx Zync SoC that combines a dual-core ARM processor, a rich set of the standard peripherals and FPGA on the same chip. This combination provides high bandwidth connection between the processors and the FPGA fabric
- 4 identical sensor ports are 30-conductor 0.5mm pitch flex cable connectors, compatible with earlier Elphel products. These connectors are split into two pairs, so they are closest to one short edge of the board - two on each side. Combined with an external multiplexer boards (at the expense of proportionally lower frame rate) each 10393 can work with up to 16 sensors (12 with the existing 10359 board)